Моделирование при разработке ультразвукового мобильного монитора скорости кровотока
Аннотация
Рассмотрено применение моделирования при разработке мобильного монитора скорости кровотока в сосудах человека. Показано моделирование методов доплерографии, схемотехническое моделирование и применение модели объекта ультразвукового исследования. Результаты моделирования подтверждены в ходе экспериментов, а также практически применены для проведения испытаний приемо-передающего тракта мобильного монитора скорости кровотока и экспериментального определения параметров пьезодатчика.
Ключевые слова: Моделирование, мобильный монитор скорости кровотока, моделирование методов доплерографии, схемотехническое моделирование, модель объекта ультразвукового исследования
05.11.17 - Приборы, системы и изделия медицинского назначения
Введение
Создание и развитие аппаратуры неинвазивного исследования гемодинамических процессов на базе метода мониторирования является актуальной научной задачей [1]. В связи с тем, что различные средства моделирования позволяют ускорить процесс разработки, уменьшить его трудоемкость, выполнить экспериментальную проверку результатов и провести испытания, то использование общедоступных и создание специализированных инструментов моделирования является неотъемлемой частью настоящей работы, где целесообразно применять моделирование для следующих задач: изучение методов допплерографии; конструирование электронных узлов; оценка параметров экспериментального пьезодатчика; испытания приемо-передающего тракта мобильного монитора скорости кровотока (ММСК).
Модели при изучении методов допплерографии
Как известно, допплеровский сигнал представляет собой частотно-модулированный сигнал несущих УЗ колебаний, и изменение расстояния между излучателем элементарным отражателем в контрольном объеме вызывает циклическое приращение фазы с частотой, пропорциональной скорости движения элементарного отражателя [2, с.115]. Реальные условия отличаются от данной упрощенной модели тем, в контрольном объеме УЗ отражается от множества отражателей-эритроцитов, обладающих сложной геометрической формой и формирующих неплоский профиль скорости движения в сечении сосуда. Тем не менее, описанная модель позволяет сопоставить различные методы формирования и приема допплеровского сигнала с использованием аппаратных и программных средств ПК.
![]()
где ΔD – приращение расстояния между излучателем и отражателем; Δt – приращение времени, соответствующее ΔD; λ – длина волны УЗ в среде; FД – допплеровская частота.
Так, при изучении метода непрерывноволновой допплерографии применялись аппаратно-программные средства LabVIEW совместно с макетом на базе генератора УЗ AD9833 и умножителя аналоговых сигналов AD835 (рис. 1а).
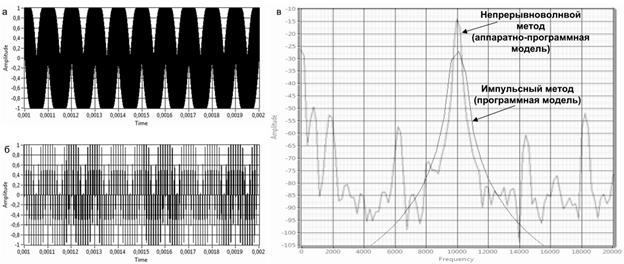
Рис. 1 – Моделирование методов демодуляции в допплерографии
Для сопоставления (рис. 1в) с методом импульсной допплерогрфии была разработана программная модель (рис. 1б). Причем исследования показали, что импульсный допплеровский сигнал однозначно выделяется при помощи синхронного детектирования СД, а при подаче на вход умножителя AD835 стробированного УЗ сигнала выделение допплеровских частот выполняется некорректно. Позднее синхронное детектирование в методе импульсной допплерографии было реализовано на базе TS5A2066. Результаты моделирования показали, что, как и описано в литературе, при постоянной скорости отражателя амплитуда огибающего сигнала изменяется с постоянной угловой частотой ωД=2π·FД и, таким образом, огибающая радиоимпульсов изменяется косинусоидально с допплеровской частотой FД.
Моделирование функционирования электронных узлов
На этапе конструирования электронных узлов прибора, как это широко распространено в практике научной и инженерной деятельности, активно применялись инструменты САПР для моделирования аналоговых цепей в системе Micro-Cap. Так, проводилось моделирование на этапах разработки узла возбуждения УЗ сигнала, узла управления усилением входного усилителя УЗ сигнала, узла фильтрации сигнала по выходу СД, эквивалентной схемы пьезодатчиков с целью определения требований к датчику и определения параметров экспериментального пьезодатчика, а также на этапе разработке схемы согласования с датчиком. В частности, проведенный анализ по результатам моделирования эквивалентной электрической схемы пьезодатчика показал, что для обеспечения приемлемой формы УЗ сигнала с допустимыми амплитудами остаточных колебаний необходимо, чтобы добротность Q датчика находилась в пределах от 10 до 20. Данные выводы согласуются с утверждениями в литературе [3, с.366].
Выводы по итогам моделирования метода детектирования импульсно-доплеровского сигнала показывают, что при подаче на вход приемного тракта ММСК непрерывного частотно-модулированного УЗ сигнала параметры приемного тракта могут быть достоверно определены практически. Результаты моделирования функционирования приемного тракта ММСК путем имитации реального сигнала при помощи генератора ГСС-120 (рис. 2а и 2б) показали, что сымитированный сигнал с доплеровским смещением в диапазоне частот от 0,01 до 8 кГц и амплитудой 20 мВ, корректно демодулируется приемным трактом и обеспечивается необходимая амлитудно-частотная характеристика (требования к АЧХ узла фильтрации СД были сформированы на этапе анализа свойств объекта УЗ исследования: граничная частота ФНЧ – 7,5 кГц, спад – не менее 20 дБ/октава).
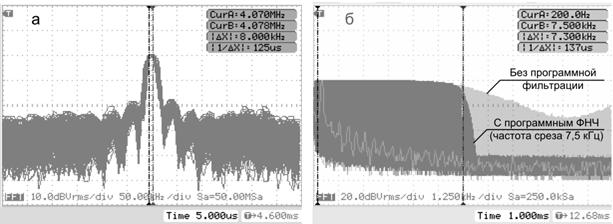
Рис. 2 – Моделирование электронных узлов и эквивалентной электрической схемы пьезопреобразователя
Дополнительная программная фильтрация применялась при измерениях АЧХ для устранения зеркальных составляющих спектра.
Модель для определения параметров экспериментального пьезодатчика
Непосредственно могут быть определены следующие электрические параметры пьезодатчика [4, с.26]: частоты механического (продольного) и электромеханического (параллельного) резонансов, частотная зависимость импеданса датчика и эффективный коээфициент электромеханической связи КЭМС. Однако, для выбора рабочей частоты датчика необходимо иметь представление об АЧХ чувствительности, которая определяется экспериментально на основе ряда методов, одним из которых является метод самовзаимности, не требующий кроме измеряемого датчика дополнительных эталонных [5, с.180]. Для обеспечения точности необходимо, чтобы расстояние между отражателем и экспериментальным датчиком составляло не менее 27 см при частоте 5 МГц. В данном случае, это требование трудновыполнимо, и кроме того, реальная глубина инсонации ММСК не превышает 5 см, что соответствует ближней зоне датчика.
Для определения частоты максимума отношения SV чувствительностей по излучению и по приему (импульсный коэффициент двойного преобразования) (рис. 3) использовалась модель объекта УЗ исследования по типу малой камеры, на которую нагружался экспериментальный датчик. Эффекты распределения интенсивности импульсного акустического поля в ближней зоне не учитывались, при этом учитывалось затухание УЗ с коэффициентом 0,5 дБ/см/МГц, определенным экспериментально:
где Sи и Sп – чувствительность по напряжению при излучении и обратная чувствительность; Uи и Uп – амплитуды напряжения возбуждения в режиме излучения и эхо-сигнала; с – скорость звука в воде; F – частота УЗ; Δt – интервал времени до прихода эхо-сигнала.
Модель представляет собой емкость, выполненную из каучука и заполненную водой. УЗ сигнал отражается от плоской противоположной стенки емкости. Акустические свойства воды достаточно близки со свойствами биологических тканей, за исключением много меньшего коэффициента затухания. Кроме того, акустические импедансы воды и каучука весьма близки по значению (в том числе и по отношению к среднему импедансу мягких тканей), что должно минимизировать отражения на границах сред в модели: Zв = = 1480 кПа*с/м, Zк = 1456 кПа*с/м, Zм.т. = 1590 кПа*с/м [6, c.20].
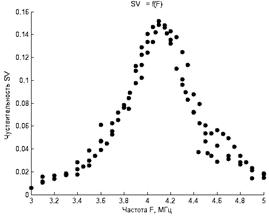
Рис. 3 – АЧХ отношения чувствительностей экспериментального пьезодатчика
Коэффициенты затухания на частоте 1 МГц ориентировочно составляют: αв = 0,002 дБ/см, αк = 13 дБ/см, αм.т. = 0,7 дБ/см. Поскольку затухание УЗ в каучуке велико и сравнимо с затуханием в костях, то для обеспечения малого затухания толщина стенки емкости выбирается малой и составляет 0,2 мм. Коэффициент затухания УЗ в объеме модели был определен экспериментально прямым методом [11, с.144] в соответствие со следующей формулой и составляет 0,5 дБ/см/МГц:
где c – скорость звука в среде; Um и Un – амплитуды напряжения m- и n-го эхо-импульсов, принимаемых в моменты времени tm и tn.
Очевидно, что данная величина характеризует не столько затухание УЗ в воде, сколько потери при прохождении и отражении на границах сред. В конечном итоге, по результатам измерений АЧХ отношения чувствительностей по напряжению была выбрана рабочая частота ММСК 4,07 МГц.
Модель для испытания приемо-передающего тракта ММСК
Необходимость использования данной модели обусловлена тем, что, во-первых, не имея заключения о безопасности УЗ излучения ММСК, невозможно проводить испытания на человеке, а, во-вторых, необходимостью регулировки скоростипотка. Разработанная модель (рис. 4а) имитирует сосуд с движущейся по нему кровью в теле человека. Аналогом крови может выступать суспензия на основе мела. Максимальная скорость потока может быть рассчитана и задается путем подбора параметров трубки с учетом вязкости суспензии, а также параметров конструкции, определяющих величину давления жидкости на входе трубки в соответствии с известными гидродинамическими соотношениями.
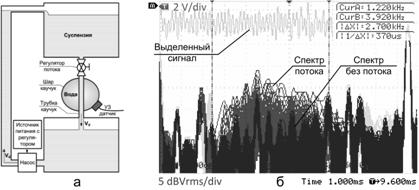
Рис. 4 – Модель для испытания приемо-передающего тракта
Для поддержания непрерывного потока на время испытаний осуществляется обратная подача суспензии в верхний сосуд из нижнего при помощи насоса с регулируемой производительностью. Для обеспечения циркуляции суспензии в верхних частях обоих сосудов имеется доступ наружного воздуха. В ходе проведения испытаний удалось детектировать допплеровский сигнал, формируемый потоком суспензии при наличии в потоке пузырьков воздуха, являющихся высоконтрастными отражателями (рис. 4б). Поскольку подводимая к датчику средняя электрическая мощность ограничена схемотехнически величиной Pср = 0,5 Вт, то при скважности D = 20 импульсов частоты повторения F = 15 кГц и амплитуде напряжения возбуждения U = 30 В импеданс экспериментального пьезодатчика, равный Z = 10 Ом на частоте УЗ F0 = 4,07 МГц, является минимально допустимым для ММСК. Увеличение подводимой к датчику мощности нежелательно, поскольку приведет к сокращению времени работы ММСК. Неспособность выделить сигнал потока суспензии без высоконтрастных компонентов может быть связана как с затуханием в контактной зоне, так и с тем, что распределение интенсивности импульсного акустического поля экспериментального датчика на рабочих дистанциях до 4 см характеризуется наличием зон слабой чувствительности [6].
Заключение
Использованные общедоступные средства моделирования, а также разработанные модели объекта УЗ исследования, позволили решить задачу конструирования ММСК и выполнить испытания приемо-передающего тракта прибора с использованием модели объекта УЗ исследования. Опытный образец ММСК совместно с экспериментальным пьезодатчиком способен непрерывно работать до 3 часов с последующей зарядкой аккумулятора в течение 2 часов, что является достаточным для проведения длительных исследований. Время непрерывной работы ММСК может быть увеличено до 4-5 часов путем оптимизации электронных узлов ММСК и параметров пьезодатчика. Таким образом, для проведения испытаний в реальных условиях совместно с ММСК должен быть разработан и испытан специализированный УЗ пьезодатчик для медицинского применения в задачах мониторирования скорости кровотока в сосудах человека. Кроме того, для проведения испытаний в реальных условиях необходимо лабораторное заключение о том, что уровни акустического излучения безопасны для человека при длительном исследовании.
Результаты исследований изложенные в данной статье получены при финансовой поддержке Минобрнауки РФ в рамках реализации проекта "Создание высокотехнологичного производства по изготовлению информационно-телекоммуникационных комплексов спутниковой навигации ГЛОНАСС/GPS/Galileo" по постановлению правительства №218 от 09.04.2010.
Литература
1.Рябоконь А.С. Перспективы применения неинвазивных методов при построении гемодинамических моделей [Текст] // Известия ЮФУ. Технические науки. Тематический выпуск: "Компьютерные и информационные технологии в науке, инженерии и управлении". – Таганрог: Изд-во ТТИ ЮФУ, 2011. № 5. – С. 129.
2.Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. – М., "Сов. радио", 1975 – 336 с, ил.
3.Медицинские приборы: Разработка и применение. Пер. Ревенко С.В. – М – Медицинская книга, 2004. – 720 с., ил. – С. 366.
4.Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезоэлектрические датчики / Под ред. В.М. Шарапова. – Москва: Техносфера, 2006. – 632 с.
5.Колесников А.Е. Акустические измерения. Л.: Судостроение, 1983, 312 с. – С. 180. Бархатов В.А. Расчет ультразвукового поля преобразователя в импульсном режиме. — Дефектоскопия, 2005, № 7, с. 3-12.