Алгоритм пространственного позиционирования акустических сигналов
Аннотация
Дата поступления статьи: 14.09.2013В статье рассматривается методика обработки пространственно-временных акустических сигналов с использованием сверточного алгоритма, цель применения которого – пространственное позиционирование источника звукового сигнала. Также учитываются реверберационные характеристики заданного помещения.
Ключевые слова: аурализация, HRTF, реверберация, сверточный алгоритм, моделирование ранних отражений, маделирование хвоста реверберации, синтез импульсных характеристик.
05.12.04 - Радиотехника, в том числе системы и устройства радионавигации, радиолокации и телевидения
В повседневной жизни каждый звук, воспринимаемый человеком, приходит с определенного направления. Человек может в реальном времени с той или иной степенью достоверности определять направление на источник звукового сигнала и расстояние до него. Поэтому развитие звуковоспроизводящей аппаратуры закономерно происходит в направлении повышения реалистичности пространственного звучания.
Традиционная звукозапись, выполняемая в специальных студиях, до определённой степени позволяет решить задачу позиционирования источника звукового сигнала в пространстве и помещения его в некоторую искусственную акустическую среду, соответствующую параметрам определенного помещения. Однако, с распространением фонограмм, формируемых из партий инструментов, записанных по отдельности и затем сводимых вместе, появилась необходимость абстрагироваться от конкретного помещения и создавать эффект присутствия другими методами [1]. В данной статье предложен способ позиционирования источника звукового сигнала. При этом учитывается влияние головы слушателя на сигнал, воспринимаемый каждым ухом, что достигается применением «искусственной головы» при звукозаписи.
На спектр звука, достигающего барабанных перепонок слушателя, влияет, в частности, дифракция звуковых волн от человеческого торса, плеч, головы, ушных раковин и др. При этом наибольшее влияние оказывает голова слушателя. Для учёта этого влияния вводится функция HRTF (Head-Related Transfer Function), представляющая собой, по сути, передаточную функцию головы. В этом случае влияние головы слушателя аналогично влиянию фильтра, а спектр сигнала, достигающего каждого уха слушателя, динамически изменяется в соответствии с положением исходного источника звукового сигнала, в зависимости от азимута, угла возвышения, диапазона частот и т.д.
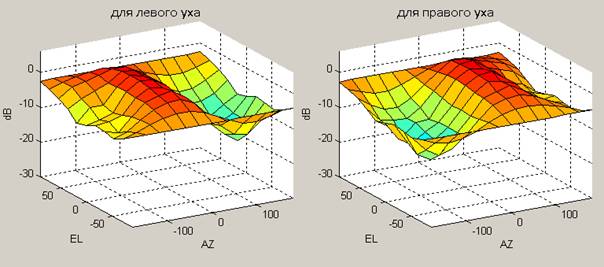
Рис. 1 - Зависимость энергии HRTF от азимута и угла возвышения
Данный алгоритм позиционирования источника звукового сигнала может быть представлена в виде четырёх последовательных этапов: запись звукового сигнала от источника, запись или синтез функции HRTF, выполнение операции свёртки этих двух функций, воспроизведение результирующей функции.
Таблица функций HRTF представляет собой трёхмерный массив импульсных характеристик, полученных при помощи натурной записи с использованием «искусственной головы», или синтезированных искусственно. Для полноценного воспроизведения аудиофайла, полученного с помощью функции HRTF, достаточно головных телефонов [2].
Для получения графиков, показанных на рис. 1, производилась запись массива функций HRTFв условиях свободного поля (заглушенное помещение) на расстоянии 15 см от «искусственной головы» для получения трехмерного массива. Обработка результатов производилось с помощью пакета Matlab R2012a.
Во временной области функцию HRTF можно представить как массив следующего вида:
![]() (1)
(1)
где: r– расстояние до источника звукового сигнала,
θ–азимут,
φ – угол возвышения источника звукового сигнала.
В частотной области функция HRTF выглядит следующим образом [3]:
![]() (2)
(2)
Для математического описания пропускания исходного сигнала через фильтр, характеристикой которого является HRTF, необходимо выполнение операции свертки. Свертка может быть выполнена во временной области с использованием заданных импульсных характеристик помещения, используемых как конечные импульсные характеристики (КИХ).
![]() (3)
(3)
Для выполнения свертки вторым способом можно перейти в частотную область с помощью быстрого преобразования Фурье (БПФ), перемножить исходный сигнал с частотной характеристикой фильтра, и далее перейти во временную область с помощью одратного быстрого преобразования Фурье (ОБПФ). При этом математический аппарат преобразования БПФ и ОБПФ позволяет учитывать временные и фазовые задержки функции HRTF [4].
Особенность предлагаемого алгоритма имитации пространственного звучания заключается в том, что свёртка HRTF производится с исходным сигналом, разделённым во времени на отрезки, длительность которых соизмерима с длительностью HRTF. Это повышает быстродействие алгоритма и дает возможность производить вычисления в реальном времени, позволяя динамически позиционировать источник звукового сигнала. Таким образом, блок-схема алгоритма может быть представлена в виде, изображенном на рисунке 2.
Рис. 2 – Модификация алгоритма свертки для применения в реальном времени
Результаты выполнения операции свертки для азимута θ=0° и угла возвышения φ=0°для левого уха представлены на рисунке 3.
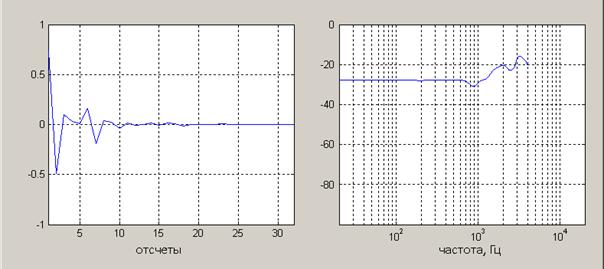
Рис. 3 – Результаты выполнения операции свертки для азимута θ=0° и угла возвышения φ=0° для левого уха
Результаты выполнения операции свертки для азимута θ=90° и угла возвышенияφ=0°для левого уха представлены на рисунке 4.
Рис. 4 – Результаты выполнения операции свертки для азимута θ=90° и угла возвышения φ=0° для левого уха
На рисунках 3 и 4 представлены импульсные характеристикии АЧХ для левого уха при положении источника звукового сигналасоответственно напротив левого и правого ушей слушателя на расстоянии 15см. В качестве тестовых сигналов использовались импульсные характеристики HRTF, заранее записанные c разрешением16 бит и частотой дискретизации 8 кГц. На второй паре рисунков хорошо заметно уменьшение амплитуды импульсной характеристик и характерный спад АЧХ примерно от 700Гц («тень головы») [5].
Как правило, HRTFснимается в заглушенном помещении. Свойства необходимого для корректного позиционирования сигнала помещения моделируются при помощи различных реверберационных характеристик данного помещения.
Для более убедительного позиционирования источника звукового сигнала в трёхмерном акустическом пространстве используется искусственная реверберация с целью достоверной передачи акустических свойств помещения, в котором дислоцируется данный источник звукового сигнала [6].
В данной статье в качестве моделиискусственного ревербератора используется гибридный алгоритм, позволяющий в реальном времени изменять параметры моделируемого помещения, что может быть применено не только с целью улучшения позиционирования сигнала в заданном помещении, но и для достижения различных художественных эффектов.
Любой реверберационный сигнал (реверберационный процесс) можно условно разделить на две составляющие: ранние и поздние отражения, фиксируемые относительно прямого сигнала. Условной границей между ними принято считать задержку, равную 100 мс. Поздние отражения – от 100 мс до практически полного затухания сигнала – представляют собой сумму большого числа диффузных отражений, имеющих различные траектории распространения. Как показывают экспертные оценки, именно поздние отражения в наибольшей степени характеризуют пространственные параметры помещения, в то время, как ранние влияют на общую естественность воспроизведения сигнала [6].
Эффективная имитация моделей поздних отражений возможна с помощью гребенчатого фильтра. Применение фильтров высоких порядков как правило, позволяет добиться весьма реалистичных результатов [7] Полная блок-схема искусственного ревербератора представлена на рис. 5:
Рис. 5 – Блок-схема искусственного ревербератора, применяемого при пространственном позиционировании звукового сигнала.
Кратко рассмотрим каждую из частей алгоритма.
Часть 1: сверточный ревербератор.
Рассмотрим более подробно первый этап: имитацию ранних отражений с помощью свёртки. Данная задача является чисто вычислительной. Как правило, используемая вычислительная мощность существенно возрастает с увеличением длины исходного сигнала, что значительно усложняет использование такого алгоритма в реальном времени [9]. В связи с этим предлагается применить несколько более сложный сверточный алгоритм, основанный на разделении сигнала во временной области на более короткие отрезки реализации и перемножение этих отрезков с соответствующими функциями HRTF в частотной области с последующим переходом во временную область по аналогии с блок-схемой, предоставленной на рис. 2.
Следует отметить достаточно высокую эффективность данного алгоритма по критерию минимума вычислительных затрат [10].
Часть 2: Параллельные гребенчатые фильтры с последующими фазовыми фильтрами
Ранние отражения, полученные изпервого этапа, сначала поступают в массив параллельных гребенчатых фильтров, за которым следует массив фазовых фильтров. Использование БИХ-фильтров снижает количество вычислений при имитации реверберационного «хвоста».
Гребенчатые фильтры с обратной связью характеризуются следующим разностным уравнением:
![]() (4)
(4)
где с – коэффициент передачи сигнала;
g – коэффициент отрицательной обратной связи;
M - длительность (количество отсчетов) задержки.
Как правило, с = 1. Тогда передаточная функция гребенчатого фильтра выглядит следующим образом:
 (5)
(5)
Соответственно, его АЧХ выглядит так:
 (6)
(6)
С целью повышения достоверности процесса реверберации на данном этапе применяется набор ФНЧ с различными параметрами, осуществляющий плавный частотный спад реверберационого сигнала. Параметры алгоритма подбирались эвристическим путем по критерию достоверности звучания. В частности, при использовании набора из 4 параллельно подключенных гребенчатых фильтров с последовательно подключенным одним фазовым фильтром наблюдался неравномерный реверберационный хвост, явно прослушивался эффект порхающего эха. При увеличении количества фазовых фильтров до трех и более – выходной сигнал приобретал неприятный «металлический» оттенок, создавая ненатуральные резонансные спектральные составляющие. При увеличении количества гребенчатых фильтров в параллельном массиве до 40 с одним последовательно подключенным фазовым фильтром на выходе реверберационного алгоритма наблюдался достаточно гладкий, естественно звучащий реверберационный сигнал, без слышимого эффекта «окраски» или порхающего эха. Однако, с увеличением количество последовательно подключенных фазовых фильтров эффект порхающего эха значительно усиливался, вызывая общее ощущение неестественности звучания реверберационного сигнала.
Таким образом, совмещая использование массива функций HRTF с моделью гибридного ревербератора, можно получить конечный сигнал, с учетом как пространственного размещения источника звукового сигнала, так и свойств помещения, в котором позиционируется данный источник.
Список литературы:
- Мокрецов А.В. Погрешность определения угла местоположения источника звука микрофонной системой с алгоритмом пространственно-временной обработки сигнала [электронный ресурс] // «Инженерный вестник Дона», 2012, №3. – Режим доступа: http://www.ivdon.ru/magazine/archive/n3y2012/895 – Загл. с экрана. – Яз. рус.
- W. G. Gardner. 3D Audio and Acoustic Environment Modeling // Wave Arts, Inc. – 1999. – 109 p.
- C. I. Cheng, G. H. Wakefield. Introduction to head-related transfer functions (HRTFs): Representations of HRTFs in time, frequency, and space // J. Audio Eng. Soc. 49(4). – 2001. – pp. 231–249
- Smith. W. The Scientist and Engineer’s Guide to Digital Signal Processing // California Technical Publishing. – 2007. – 643 p.
- Campbell, D. RoomSim acoustic toolbox for MatLab // IEEE CS Tech. Com. On Computer Generated Music. – 2007. – Vol.1. – P.120–126.
- Toma, N., Topa, M., Szopos, E. Aspects of reverberation algorithms // ISSCS International Symposium on Signals, Circuits and Systems. – 2005. – Vol. 2. – P. 577–580.
- Smith, J. Spectral Audio Signal Processing // Center for Computer Research in Music and Acoustics (CCRMA). Stanford, California. – 2010. – 235 p.
- McGovern, Stephen G. A Model for Room Acoustics [электронный ресурс] // – University of Victoria, 2004. – Режим доступа: http://www.sgm-audio.com – Загл. с экрана. – Яз. англ.
- Toma, N., Topa, M.D., Popescu, V., Szopos, E. Comparative Performance Analysis of Artificial Reverberation Algorithms // IEEE Automation, Quality and Testing, Robotics. – 2006. – Vol. 1. – P. 138–142.
- Таранов Д.Д. Гибридный Реверберационный Алгоритм [электронный ресурс] // «Инженерный вестник Дона», 2013, №3. – Режим доступа: http://ivdon.ru/magazine/archive/n4y2011/553 – Загл. с экрана. – Яз. рус.