Кинематическое исследование механизма поворота ковша канатного экскаватора
Аннотация
Дата поступления статьи: 15.12.2013Проведено кинематическое исследование механизма поворота ковша канатного экскаватора. Рассмотрена часть траектории рабочего процесса, на которой осуществляется поворот рукояти относительно стрелы с одновременным поворотом ковша относительно рукояти. Поворот ковша осуществляется за счет дополнительной кинематической связи ковша с рукоятью и/или стрелой и реализующей внутренние усилия, обусловленные соответствующим взаимным расположением стрелы и рукояти.
Ключевые слова: канатный экскаватор, поворот ковша, кинематика, аналттическое исследование
05.05.04 - Дорожные, строительные и подъемно-транспортные машины
Производственные наблюдения рабочего процесса копания экскаватором ЭО-4112 с обратной лопатой, показали, что главной причиной снижения его эксплуатационной производительности является потеря части зачерпнутого грунта на участке подъема и переноса его к месту выгрузки. Это обусловлено, прежде всего, конструктивными особенностями жесткого крепления ковша к рукояти, при котором положение ковша определяется только двумя угловыми координатами: углами поворота стрелы – ![]() и рукояти –
и рукояти – ![]() . Это в принципе исключает возможность рационального положения ковша на соответствующем участке траектории (заглубления, зачерпывания, транспортирования, выгрузки). На гидравлических экскаваторах эта проблема решается путем шарнирного соединения ковша с рукоятью и управлением его поворотом дополнительным гидроцилиндром, т.е. положение ковша в этом случае определяется уже тремя координатами –
. Это в принципе исключает возможность рационального положения ковша на соответствующем участке траектории (заглубления, зачерпывания, транспортирования, выгрузки). На гидравлических экскаваторах эта проблема решается путем шарнирного соединения ковша с рукоятью и управлением его поворотом дополнительным гидроцилиндром, т.е. положение ковша в этом случае определяется уже тремя координатами – ![]() ,
, ![]() и углом поворота ковша –
и углом поворота ковша – ![]() . Для экскаваторов с канатной подвеской шарнирное крепление ковша к рукояти требует дополнительного устройства управления его поворотом. При этом известные схемы внешнего воздействия на ковш практически невозможно согласовать с существующей конструкцией рабочего оборудования. Решение данного вопроса возможно только за счет дополнительной кинематической связи ковша с рукоятью и/или стрелой и реализующей внутренние усилия, обусловленные соответствующим взаимным расположением стрелы и рукояти [1].
. Для экскаваторов с канатной подвеской шарнирное крепление ковша к рукояти требует дополнительного устройства управления его поворотом. При этом известные схемы внешнего воздействия на ковш практически невозможно согласовать с существующей конструкцией рабочего оборудования. Решение данного вопроса возможно только за счет дополнительной кинематической связи ковша с рукоятью и/или стрелой и реализующей внутренние усилия, обусловленные соответствующим взаимным расположением стрелы и рукояти [1].
Для практической реализации предложенной конструкции необходимо провести кинематическое и динамическое исследование механизма поворота, схема которого представлена на рисунке.
Схема отражает наиболее значимую в свете рассматриваемого вопроса часть траектории рабочего процесса, на которой осуществляется поворот рукояти относительно стрелы с одновременным поворотом ковша относительно рукояти.
Расположим центр прямоугольной системы координат О1 в точке крепления рукояти к стреле совместив ось X с линией соединяющей точку поворота рукояти с точкой поворота стрелы О3. В рассматриваем случае ось Х горизонтальна (угол поворота стрелы ![]() ), гидроцилиндр Ц2 закрыт, т.е. звено АВ жесткое, а гидроцилиндр Ц1 открыт, что позволяет эвену КН изменять свою длину в соответствии с поворотом ковша.
), гидроцилиндр Ц2 закрыт, т.е. звено АВ жесткое, а гидроцилиндр Ц1 открыт, что позволяет эвену КН изменять свою длину в соответствии с поворотом ковша.
Механизм поворота ковша представляет собой два смежных четырехзвенных механизма: О1АВО2 и О2СDE, где для первого механизма О1АВО2 ведущим звеном является рукоять 1 (звено О1О2). Звено 1 вращается с угловой скоростью ω1 за счет тягового каната 12 наматываемого на барабан главной лебедки с приводом от электродвигателя (Тдв). Для второго механизма О2СDE ведущим является звено 5 (О2С) которое есть продолжение звена 2 (О2В) первого механизма О1АВО2. В результате кинематического анализа должны быть установлены функциональные зависимости углов φ2, φ3, φ5, φ6и φ7 обоих четырехзвенных механизмов от ведущего звена 1, а также угловые скорости ω2, ω3, и ω7. Эти зависимости позволят определить угол поворота ковша как по отношению к рукояти 1, так и по отношению к горизонту (линия передней грани боковой стенки ковша 11), а так же скорости перемещения гидроцилиндров Ц1 (тяга переменной длины 10) и Ц2 (тяга переменной длины – звено 3).
Известны различные методы аналитического исследования плоских шарнирных механизмов [2-8] включая и исследование кинематики рабочего органа одноковшового экскаватора [9] и его нагружения [10]. В последнее время для решения задач синтеза все шире используются различные компьютерные программы [5,6]. В известном труде [2] задачи кинематического исследования сводятся к совместному решению уравнений проекций на оси координат контуров, образованных звеньями механизмов, с последующим дифференцированием этих уравнений для определения угловых скоростей. А в [3] первую часть задачи определяют другим способом – путем решения дополнительно построенных на исследуемом механизме треугольников.
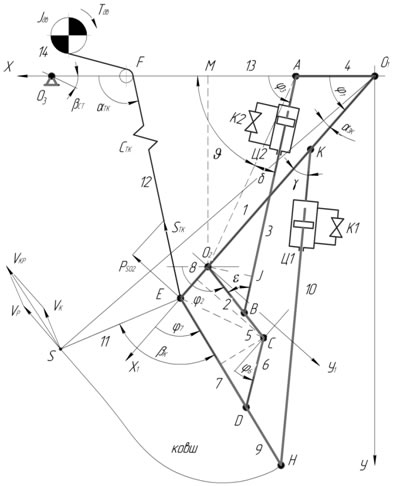
Рис. – Схема механизма поворота ковша
В рассматриваемом механизме соотношения длин звеньев определяют его работу по повороту ковша только в одной четверти окружности, причем проекции звеньев 2 и 3 пересекаются, что выводит данный механизм из ряда классических. Это определило комбинированный подход к решению поставленной задачи.
Обозначим для краткости длины звеньев
O1O2 =l1; O2B =l2; AB =l3; AO1 =l4; O2C =l5; CD =l6; ED =l7; EO2 =l8; EH =l9; HK =l10; EF =l12; O1F = l13.
Для определения угловой скорости ω1 звена 1 запишем из треугольника О1FE векторное равенство
FE = O1E + FO1 .
Уравнения проекций на оси координат
![]() (1)
(1)
![]() .
.
Для определения угла ![]() разделим второе уравнение на первое. Получим
разделим второе уравнение на первое. Получим
![]() .
.
Для определения угловой скорости звена 1 дифференцируем по времени t первое уравнение из (1).
![]() .
.
Из углов в этом уравнении вычтем угол ![]() . Тогда имеем
. Тогда имеем
![]() .
.
Откуда находим значение ![]() , (2)
, (2)
где ![]() – скорость каната, навиваемого на барабан;
– скорость каната, навиваемого на барабан;
![]() – угол образованный канатом 12 и звеном 13.
– угол образованный канатом 12 и звеном 13.
Скорость каната с учетом полиспастной системы равна
![]() ,
,
где ωдв – угловая скорость двигателя лебедки;
Rб – радиус барабана;
i – передаточное число привода барабана;
aп – кратность полиспаста.
Рассмотрим четырехзвенный механизм О1АВО2 .
Из прямоугольного треугольника AO2J следует
![]() (3)
(3)
![]() (3)
(3)
Неизвестные углы φ3 и ε определяются из соответствующих треугольников, построенных на исследуемом механизме.
Из прямоугольного треугольника АО2М получаем
![]() , (4)
, (4)
а из треугольников О1О2А и О2АВ
![]()
![]() .
.
Откуда ![]() .
.
Обозначим
![]() и
и ![]() . (5)
. (5)
Окончательно имеем ![]()
Таким образом, вычисляя последовательно по формулам (5), (4) и (3) углы ε, v и δ, определяем угол ![]()
![]() . (6)
. (6)
Для определения угла φ2 и скоростей звеньев механизма воспользуемся методом, изложенным в [2].
Векторное уравнение замкнутости контуров О1АВО2
![]() .
.
Проектируя это уравнение на оси O1X и O1Y, получаем
 (7).
(7).
Так как ![]() , то
, то ![]() и
и ![]() , то уравнения (7) получают вид
, то уравнения (7) получают вид
![]()
![]() . (8)
. (8)
Угол φ2 определяется из последнего уравнения (8)
![]() . (9)
. (9)
Для определения угловых скоростей ω2 и ω3 звеньев 2 и 3 дифференцируем уравнения (8) по времени t . Получаем
![]()
![]() .
.
Имея в виду, что ![]() ,
, ![]() и
и ![]() , имеем
, имеем![]()
![]() . (10)
. (10)
Из углов входящих в первое уравнение (10) вычитаем общий угол φ2 , что соответствует повороту осей координат XO1Y на угол φ2 . Получаем
![]() ,
,
Откуда находим угловую скорость звена 3
![]() . (11)
. (11)
После аналогичного преобразования первого уравнения (10) путем поворота осей координат XO1Y на угол φ3 получаем выражение для угловой скорости ![]()
![]() . (12)
. (12)
Для определения угла ![]() непосредственно характеризующего поворот ковша (звено 7) относительно рукояти (звена 1) рассмотрим смежный четырехзвенный механизм O2CDE. Введем подвижную систему координат X1O2Y1, связав её с центром вращения ведущего (для смежного механизма) звена O2C. Обозначив дополнительные углы O2EC = v2 , O2EC = δ2 и O2EC =
непосредственно характеризующего поворот ковша (звено 7) относительно рукояти (звена 1) рассмотрим смежный четырехзвенный механизм O2CDE. Введем подвижную систему координат X1O2Y1, связав её с центром вращения ведущего (для смежного механизма) звена O2C. Обозначив дополнительные углы O2EC = v2 , O2EC = δ2 и O2EC =![]() и выполнив все аналогичные вышеприведенным для механизма О1АВО2 преобразования в результате получаем выражения для определения всех значимых углов и угловых скоростей.
и выполнив все аналогичные вышеприведенным для механизма О1АВО2 преобразования в результате получаем выражения для определения всех значимых углов и угловых скоростей. ![]() ;
; ![]() ;
;
![]() ,
,
где ![]() ;
; ![]() .
.
![]() (13)
(13)
![]() (14)
(14)
![]() .(15)
.(15)
Скорость изменения длины звена 10 (хода поршня гидроцилиндра Ц1)
определяется из векторного уравнения
КЕ + ЕН = НК .
Уравнения проекций этого уравнения на оси координат имеют вид
![]()
![]() . (16)
. (16)
Разделив второе уравнение на первое, получаем значение угла ![]()
![]() (17)
(17)
Для определения скоростей продифференцируем по времени t уравнения (16). Получаем
![]()
![]() . (18)
. (18)
Из углов в уравнениях (18) вычитаем угол ![]() . В результате получаем значения скоростей.
. В результате получаем значения скоростей.
Скорость изменения длины звена 10 (![]() ) равна
) равна
![]() . (19)
. (19)
Угловая скорость звена 10
![]() .
.
Полученные функциональные зависимости кинематических параметров механизма поворота одноковшового экскаватора в виде выражений (1)…(19) позволяют проводить анализ механизма для любых значений угла поворота рукояти ![]() .
.
Литература:
- Патент РФ 2450106, МПК Е02F 3/42. Рабочее оборудование ковшового экскаватора / В.С. Исаков, Ю.В. Максимов, Г.М. Симелейский; заявлено 15.10.2010; опубл. 10.05.2012, Бюл. № 13. – 8 с., ил.
- Артоболевский И.И. Теория механизмов и машин. [Текст]. Издание третье. – М.: Гос. изд-во технико-теоретической литературы, 1953. – 712 с.
- Кожевников С.Н. Теория механизмов и машин. [Текст]. – М.: Машгиз, 1949. – 448 с.
- Зиновьев В.А. Аналитические методы расчета плоских механизмов. [Текст]. М., Гостехиздат, 1949. – 204 с.
- Зиборов К.А. Решение векторных уравнений кинематики механизмов с помощью программы Mathcad [Текст] / К.А. Зиборов, И.Н. Мацюк, Э.М. Шляхов // Теория механизмов и машин. 2008. №1. Том 6. С. 64-70.
- Верховод П.В. Решение задачи приближенного синтеза четырехзвенного механизма с помощью программы mathcad [Текст] // Теория машин и механизмов. – 2011. – № 2, Том 9. – С. 53-64.
- Hartenberg, R.S., and Danavit, J. 1964, Kinematic Synthesis of Linkages. McGrawHill, Ney York. http://ebooks.library.cornell.edu/cgi/t/text/text-idx?c=kmoddl;idno=kmod013.
- Freudenstein, F. Approximate synthesis of four-bar linkages. Transactions of ASME, 1955, Vjl. 77, pp. 853-861/
- Павлов В.П. Информационно-логическая модель системного проектирования одноковшовых экскаваторов [Электронный ресурс] // Инженерный вестник Дона, 2010. №3. – Режим доступа: htt: // www/ ivdon.ru / magazine / archive/n3y2010/238 / (доступ свободный). – Загл. с экрана. – Яз. рус.
- А.А. Котесова. Уточненное определение ресурса совокупности по выборочным данным для стрелы одноковшового экскаватора [Электронный ресурс] // Инженерный вестник Дона, 2013. №2. – Режим доступа: htt: // www/ ivdon.ru / magazine / archive / n2y2013/1695 / (доступ свободный). – Загл. с экрана. – Яз. рус.